
Monday, March 24, 2014, 01:50 PM
Visit my new website! www.ByteDelight.com.This current website with this old blog will be migrated to the new ByteDelight.com soon.
| 0 trackbacks
| permalink
| related link
Thursday, February 13, 2014, 06:53 PM
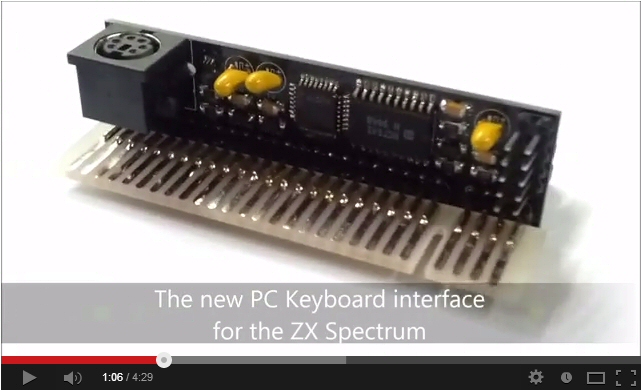
It's here! The new PC Keyboard interface for the ZX Spectrum.Use the 'Contact Me' form on the right to order one!
Click here for the user manual.
And click here for a YouTube video of it's functions:
Thursday, January 9, 2014, 08:34 AM
This week I finally created a Facebook page dedicated to my technical hobbies including the Sinclair related projects:www.facebook.com/BenVersteegTech.
I will try to migrate this blog to that Facebook channel in the future, to have everything at one location.
Wednesday, October 30, 2013, 08:05 AM
Read all about it here:http://www.worldofspectrum.org/forums/s ... hp?t=45399

Tuesday, August 6, 2013, 09:50 AM
As this one isn't available anywhere else yet, I've uploaded it to my public server:http://benophetinternet.nl/hobby/vanmez ... s_2.31.rom
Next
 Archives
Archives




